

Robots capaces de dar asistencia a personas mayores o dependientes, que abran armarios, levanten persianas y recojan el correo, que muevan dispositivos pesados en fábricas, que realicen tareas de vigilancia y seguridad, limpieza y reciclaje de basuras, robots con uso agrícola capaces de recoger la fruta, que corten piezas de carne, que se encarguen del mantenimiento de bosques y de la unión y pegado de piezas en la producción de suelas de calzado. En ello, y más, trabaja la industria y para conseguirlo es clave que los dispositivos robóticos tengan cada vez mayor autonomía. Las universidades de Alicante y Miguel Hernández de Elche (UMH) investigan, desarrollan y prueban algoritmos que harán posible que esto no sea ciencia ficción: el objetivo es que sean capaces de resolver todo tipo de situaciones en entornos complejos.

La presencia de los robots autónomos es cada vez mayor en la vida diaria. Dos ejemplos claros de ello son las aspiradoras que limpian los hogares y los drones que vuelan con sus cámaras. Para dotar de mayor movilidad a estos dispositivos robóticos, la Generalitat ha impulsado un proyecto emergente, del que forma parte el grupo de investigación Automatización, Robótica y Visión por Computación, perteneciente a la Universidad Miguel Hernández. Los investigadores universitarios trabajan en el desarrollo de algoritmos que permitan que los robots tengan cada vez más capacidad de resolver por sí solos situaciones imprevistas en entornos complejos, como pueden ser un hospital, un aeropuerto o un museo. «Algunos de estos robots funcionan de forma autónoma para hacer tareas sistemáticas en entornos cerrados. Otros funcionan de manera teleoperada, con una persona que toma el control de la máquina. Nuestro objetivo es dotarlos de mayor autonomía para que sean capaces de operar en entornos más complicados y hacer tareas más complejas de forma independiente», resume la investigación el profesor del Departamento de Ingeniería de Sistemas y Automática de la UMH Luis Payá Castelló. «Uno de los problemas que hay que resolver es el de la creación de mapas y localizaciones mediante información visual», añade el docente.

La mayor parte de los dispositivos cuentan con una cámara instalada que es capaz de captar imágenes panorámicas de su entorno. Lo positivo de esto es que, con una sola imagen, el robot obtiene una información completa de lo que le rodea. El problema es que esa fotografía supone mucha información que hay que saber procesar para extraer lo más significativo de forma óptima. En este punto entra en juego la labor de investigación de la UMH, creando y estructurando mapas para que la comunicación entre persona y máquina sea cada vez más fluida. «Un problema que tienen los algoritmos de creación de mapas es que puede que funcionen muy bien, pero dificulten la comunicación entre persona y robot. Otra traba en el día a día es la complejidad de los entornos sociales y los cambios imprevistos», sostiene Payá Castelló.
El nivel de iluminación es otro factor a tener en cuenta. «Se puede dar el caso de que este mapa visual se cree en un día luminoso de verano y que, cuando le vayamos a dar uso al dispositivo, esté anocheciendo», apostilla el profesor universitario sobre los distintos escenarios a los que están dando solución desde el campus ilicitano. Uno de los trabajos que realiza el grupo de investigación persigue que los robots tengan mayor capacidad para organizar la información que reciben y comparar las imágenes que captan. Ello les permitiría ofrecer respuestas más rápidas, incluso cuando estén actuando en escenarios con mucha concurrencia de personas que tapen la toma de datos.
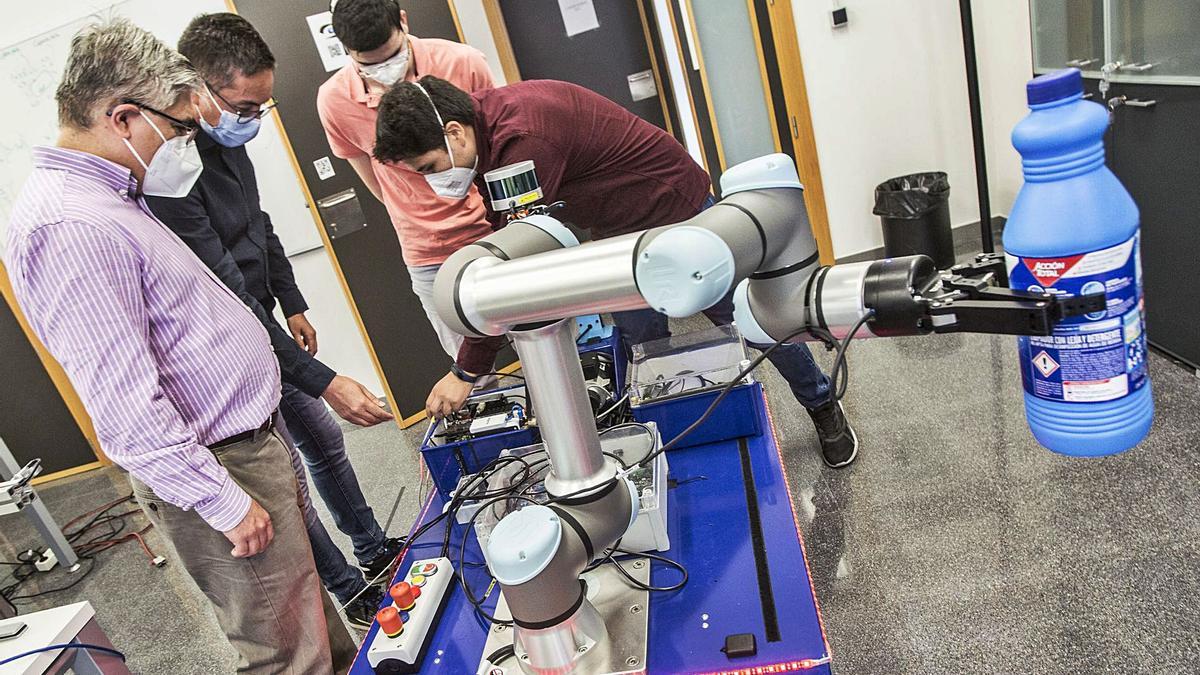
El grupo Automática, Robótica y Visión Artificial del Instituto de Investigación Informática de la Universidad de Alicante (Aurova), dirigido por el profesor Fernando Torres, ha construido un robot con una carretilla manual que han modificado por completo para automatizarla. El resultado es un robot terrestre capaz de navegar de manera autónoma por exteriores con un brazo robótico dotado con un algoritmo de calificación de agarre para recoger envases de plástico y vidrio. La recogida de basuras es la aplicación práctica del proyecto «Manipulación móvil para entornos exteriores no estructurados (Momue)», en fase de experimentación en el Campus y que es posible gracias a unos sensores que permiten al robot autolocalizarse en el entorno por el que navega y detectar objetos que pueden catalogarse como basura, explican Francisco Candelas, investigador coordinador junto a Santiago Puente; y Pablo Gil, director del Instituto Universitario de Investigación Informática, quien acaba de concluir su participación como coordinador del proyecto europeo Commandia de sistemas multirobóticos para el ensamblado de suelas que busca automatizar tareas manuales en la producción de calzado. En este caso, se ha construido una celda robótica con la intervención de varios dispositivos en el pegado de la suela a la horma, proceso que suele realizar manualmente una persona con una máquina que da presión y calor al pegamento; y que es complejo al ser materiales flexibles que se deforman. Como dijo Gil, han utilizado sensores táctiles en el extremo de las piezas para controlar el agarre de las suelas, información digitalizada, cámaras, y algoritmos adaptados a las necesidades. En este proyecto europeo, el Centro de Innovación y Tecnología Inescop diseñó la celda automatizada y la integración del algoritmo; la Universidad Sigma (Francia) la parte de control; Coimbra (Portugal) la reconstrucción; y la Universidad de Alicante el control de la deformación con dispositivos móviles. También intervino la Universidad de Zaragoza.
Al grupo Automática, Robótica y Visión Artificial de la UA le acaban de conceder el proyecto «Hacia una mayor integración de robots inteligentes en la sociedad: navegar, reconocer y manipular», dentro de la convocatoria Prometeo a grupos de excelencia en colaboración con la Universidad Miguel Hernández, a la que pertenece el coordinador y catedrático principal Óscar Reinoso. Este proyecto utilizará tecnología «deep learning», cámara multiespectral y una mano robótica que perfecciona el dispositivo para recoger objetos. La Inteligencia Artificial permitirá al robot discriminar entre ellos y clasificarlos, dándole información de los materiales, así como detectar la distancia al suelo. Se utilizarán algoritmos para determinar si el objeto está estable o sufre deslizamientos y para estimar los puntos de agarre, lo que posibilitará al robot elegir entre apretar el objeto o soltarlo sin que se deforme.
Volviendo al prototipo con el que trabaja ahora el grupo Aurova, el robot tiene una autonomía de 40 kilómetros. Comenzaron con él en enero de 2019 y se encuentra en su última fase (concluirá en junio de 2022). Cuenta con financiación pública estatal (117.000 euros) y es desarrollado por Torres, Gil, Candelas y Puente, junto a un técnico contratado, y dos becarios predoctorales.
El robot lleva sensores en las ruedas para conocer su velocidad y evitar chocarse, receptor de GPS para saber dónde está, «lídar» láser de visión tridimensional, radar para medir la distancia y cámara «rgbd» para identificar objetos. También ordenadores a bordo para tener información visual y controlar el movimiento del vehículo, y funciona con baterías de camión. Según explican Gil y Candelas, la parte de navegación, es decir, el desplazamiento evitando a la gente y los obstáculos, está bastante resuelta; así como la de manipulación, y faltaría integrar ambas. «La aplicabilidad es amplia. Se enfoca a la parte de limpieza y recogida de basuras porque los planes estratégicos a nivel estatal tienen que ver con sostenibilidad y reciclado de productos; pero puede usarse con fines agrícolas para recoger frutas; para mantenimiento de bosques; y para paquetería y mensajería».
El grupo de Robótica y Visión Tridimensional (RoVIT) de la UA, dirigido por Miguel Angel Cazorla, trabaja en el proyecto «A2HUMPA: Aprendizaje y análisis de comportamientos humanos para monitorización, asistencia personalizada y detección temprana de dolencias». Su objetivo es ayudar a las personas dependientes (con discapacidad y mayores). «Para ello, nos proponemos construir un sistema capaz de identificar cambios en su comportamiento normal que pueda servir para detectar situaciones anómalas (temblores, desorientación, pérdida de memoria) o para ayudar a la detección temprana de enfermedades en personas aparentemente sanas».
Este grupo ha desarrollado un robot, Pepper, un asistente que ya ha realizado tareas asistenciales en pruebas en residencias de la tercera edad. Las habilidades para las que está programado consisten en realizar planes de ejercicios para mejorar la movilidad e incluso para recordar a una persona mayor cuándo le toca tomar la medicación o que lleva demasiado tiempo sin ingerir líquidos. Lo hace posible un complejo sistema de cámaras y sensores con el aprendizaje propio de la Inteligencia Artificial. El robot para ayuda en el hogar se controla mediante voz.
Beneficios
Aunque la sanidad y la educación están entre los grandes beneficiados de estas investigaciones, las utilidades van mucho más allá. Los dispositivos estarán capacitados para transportar objetos, abrir armarios, levantar persianas o coger el correo del buzón. También se trabaja para que intervengan en entornos industriales, en los que muevan materiales pesados, e incluso en alimentación. Hay empresas cárnicas interesadas, de ahí las pruebas para que los robots detecten la forma de las piezas para no romperlas o puedan hacer operaciones como cortes. Los asistentes también están capacitados para labores de vigilancia o seguridad, como alertar de la presencia de un intruso o de un incendio.
¿Cuál será el futuro de la investigación? El profesor Payá Castelló responde a esta cuestión: «Surgen ideas y posibilidades de mejora. Estamos planteando experimentos relacionados con entornos cada vez más grandes, variados y exigentes, en los que haya cambios de iluminación y personas circulando. Afinar los algoritmos permitirá responder a las situaciones más inesperadas».
LAS CIFRAS
588.000 EUROS
Dotación del programa Prometeo para una nueva investigación UA-UMH
El proyecto persigue perfeccionar las habilidades de un robot con numerosos algoritmos de Inteligencia Artificial y «deep learning».
117.000 EUROS
Financiación para el proyecto del grupo Aurova de la Universidad de Alicante
El proyecto de robot que discrimina y recoge basura acabará en junio de 2022.








